 Technical Note on Line Separation for JS-50 WX units¶
Technical Note on Line Separation for JS-50 WX units¶
Affected Models: JS-50 WX
Description¶
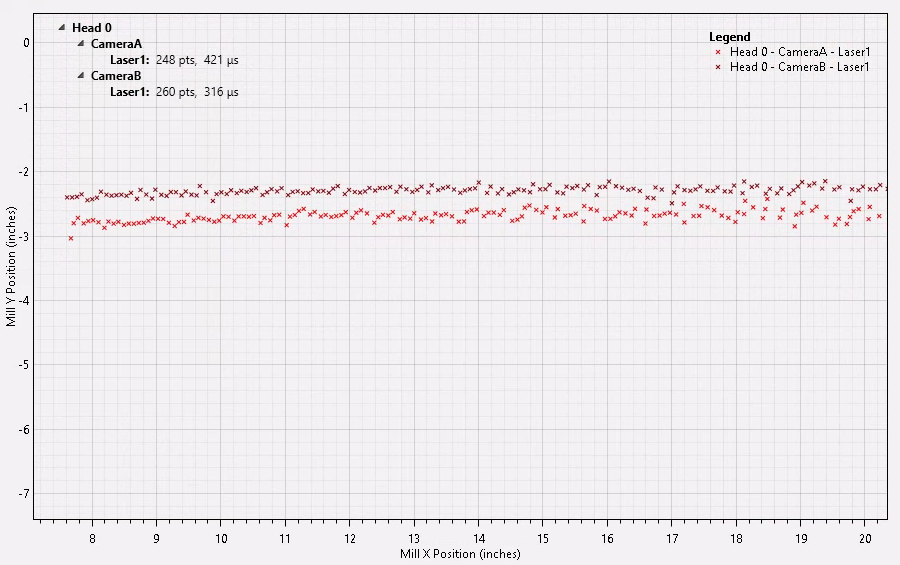
Some JS-50 WX scan heads have been found to exhibit data separation between profile points from Camera A and Camera B. Under normal circumstances, these points should be largely coincident. The data separation is most noticeable when the laser plane intersects a flat object in the field of view. The resulting data points of profiles should form a single line, but for affected units, two distinct lines can be seen. The separation typically increases with distance.
Cause¶
During the manufacturing of JS-50 WX units, each undergoes a calibration process, determining the parameters to transform the measured points on the image sensor into Cartesian coordinates in the laser plane. These parameters are calculated separately for both cameras, and are independent of each other. The calibration process chooses parameter sets such that both coordinate systems are identical.
The calibration for a given scan head will continue to be valid as long as everything relating to it's optics remains as it was during the calibration process. However over time and temperature cycles, there can be very small movements in the internal components of the scan head. This can lead to a small separation of the profile data between the two cameras.
Effect¶
To bring the measured coordinates into a user-specified mill coordinate system, the Pinchot API offers built-in functions, namely:
public void SetAlignment(double rollDegrees,
double shiftX,
double shiftY)
int SetAlignment(double roll_degrees,
double shift_x,
double shift_y);
These functions apply the same shift and rotation to both cameras, thus not removing the separation occurring after factory calibration.
Resolution¶
There are three approaches to correcting scan heads affected by this issue.
Resolution #1: Alignment per Camera-Laser-Pair¶
Alignment per Camera-Laser-Pair
JoeScan strongly recommends independent (per Camera-Laser-Pair) alignment for all applications regardless of whether any of the scan heads exhibit data separation.
The Pinchot API offers functions to apply separate transformations for each camera, namely
public void SetAlignment(Camera camera,
double rollDegrees,
double shiftX,
double shiftY)
int SetAlignment(jsCamera camera,
double roll_degrees,
double shift_x,
double shift_y);
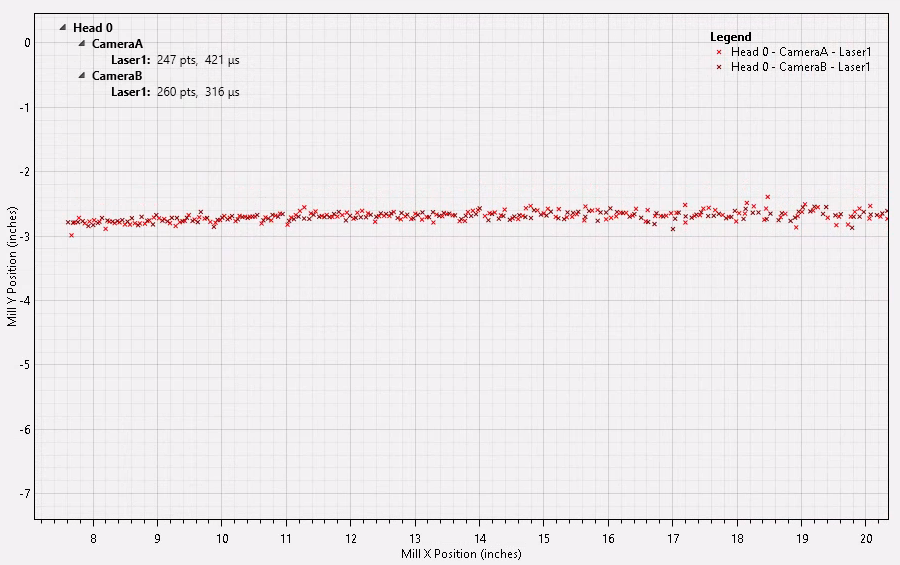
By aligning the measured data separately for each camera, small differences between the coordinate systems are removed; this means that the affected units can be used in production if the alignment procedure is done separately for each camera.
Resolution #2: Factory Calibration Correction¶
Future Improvements
This process will be streamlined in the future with improved tooling provided by JoeScan.
If modifying your application's code to align each camera independently is difficult or impossible, it is possible to modify the factory calibration using a small command line application provided by JoeScan.
- Open SensorTester, begin scanning, and note the offset between data from Camera A and Camera B.
-
Download the
CameraCorrectiontool here. -
Run the tool providing the serial number of the scan head and the offset value:
CameraCorrection.exe -s SERIAL -c CORRECTION
Cumulative Effect
Changing the correction more than once will result in the total correction being the cumulative sum of all corrections. Setting the correction to 0 will clear the correction and return the scan head to an uncorrected state.
The scan head can now be used reliably without modifying your application.
Resolution #3: Request For Manufacturing Assistance¶
If you own one or more units affected by data separation, and feel that neither of the above workarounds are feasible for your application, please contact JoeScan Support. We will work with you to get the units repaired and recalibrated. However, JoeScan is confident that the workarounds presented above solve the issue in a clean and safe manners.